

عرض المشكلة
اقدم مشروعي هذا بهدف ايجاد حل لتقليل حوادث المركبات التي ادت لزيادة اعداد الوفيات في المملكة، تشتت سائق المركبة واحدة من الاسباب التي ادت الى زيادة الحوادث.
مشروعنا يقدم نموذج اولي مصغر لسيارة ذاتية القيادة تقوم بتفادي الاجسام التي يكتشفها من حولها باستخدام الحساسات او الكاميرا الموجودة امام السيارة، كذلك تقوم بالانتقال من مكان معين الى وجهة اخرى محددة داخل حدود مبنى دون تدخل بشري.
القسم ١.١: الهدف
واحدة من اعلى ١٠ أسباب الوفيات في الدول منخفضة الدخل والمتوسط الادنى مابين ٢٠٠٠-٢٠١٩ م هي إصابات الحوادث، اعداد وفيات الحوادث في العالم مستمرة في ارتفاعها، ووصلت الى ١.٣٥ مليون في ٢٠١٦؛ وتشمل السيارات، الباصات، الدرجات النارية، الدراجات الهوائية، الشاحنات طبقاً لمنظمة الصحة العالمية.
محلياً، طبقاً للتقارير الاحصائية التي تقدر بأن اعلى خمسة اسباب رئيسية تؤدي لزيادة الحوادث طبقا لشركة “نجم” لخدمات التأمين في المملكة العربية السعودية، وهي:
- تغيير مسار المركبة بحركة غير آمنة.
- عدم وجود مسافة آمنة بين المركبات في الطريق.
- القيادة في الاتجاه المعاكس.
- استخدام الهاتف المحمول.
- انتهاك قواعد أولوية القيادة.
تشتت السائق هو سبب مساهم في وقوع الحوادث المرور، مما يؤدي الى زيادة في الخسائر البشرية والتأثير على اقتصاد الفرد والدول.
القسم ١.٢: بيان الهدف
يهدف التطور المستمر للمركبات ذاتية القيادة إلى تقديم اعلى اجراءات السلامة اكبر من التقنيات السابقة. بدلاً من بناء نموذج حقيقي للمركبات، سوف نستخدم نموذج سيارة ذاتية القيادة مصغر لمحاكاة السيارات الحقيقة للسماح لها بالتنقل من مكان الى آخر داخل مبنى او مساحة صغيرة، كذلك اكتشاف وتفادي الاجسام التي تعيقها عن الحركة.
القسم ١.٣: المسح البحثي
من خلال بحثنا في جميع المصادر الموثوقة وجدنا هذه التقنيات ذات الصلة بالمشروع:
١.٣.١ Simultaneous Localization And Mapping(SLAM):
طريقة تستخدم مع المركبات ذاتية القيادة لبناء خريطة و تحديد مكانها لإكتشاف الأجسام وتفاديها. كذلك، تستخدم العديد من المعلومات التي يتم جمعها مثل: عدد دورات العجلات لمعرفة المسافة المقطوعة، وتسمى بعملية Localization. في ذات الوقت، الكاميرا او حساسات تُستخدم لبناء خريطة وتحديد الأجسام للمكان الموجود فيه، وهذه العملية تسمى بـ Mapping. تطبق في العديد من الروبوتات، السيارات ذاتية القيادة، الطائرات بدون طيار، والمركبات المستقلة تحت الماء.
بالإضافة إلى ذلك، يتم تقسيم النظم الخوارزمية إلى نوعين رئيسيين: VSLAM و LIDAR SLAM.
VSLAM (Visual SLAM):
- يعتمد على استخدام كاميرا ستيريو كمدخل.
- تهيئة الخريطة وتثليث نقاط الخريطة ضروريان لإعادة بناء الخريطة ثلاثية الأبعاد.
- يمكن أن تفشل بسهولة بسبب تعقيد عمليات التهيئة والتثليث.
- ظهور كاميرا RGB-D حل مبتكر يوفر صورة RGB بالإضافة إلى معلومات العمق لتحسين الأداء.
LIDAR SLAM:
- يعتمد بشكل أساسي على استخدام مستشعر ليزر.
- يولد بيانات سحابة النقاط بثنائي الأبعاد (x، y) أو ثلاثي الأبعاد (x، y، z).
- توفر بيانات الليزر قياسات دقيقة للمسافة وتعمل بكفاءة عالية في إنشاء الخرائط.
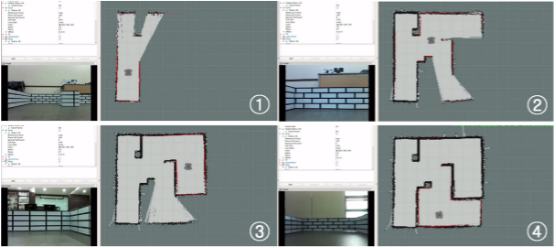
بالتالي، تقسّم طريقة SLAM المعتمدة على الأساس البياني للتحسين الخرائطي مشكلة SLAM إلى جزئين: الجبهة الأمامية والخلفية. تتولى الجبهة الأمامية بناء خريطة المواضع، بينما تقوم الخلفية بضبط تكوين الرسم البياني من خلال التحسين. يتم استخدام التكامل البياني التالي لمستشعري 2D LiDAR وكاميرا RGB-D في تسجيل البيانات للجبهة الأمامية واكتشاف إغلاق الحلقة لتحسين دقة صورة الموضع كما في الصورة 1 أدناه.
١.٣.٢ منصة برمجيات الروبوت:
هي منصة مقسمة إلى منصة برمجيات ومنصة أجهزة. تشمل منصة برمجيات الروبوت أدوات تُستخدم في تطوير برامج التطبيقات الروبوتية مثل تجريد العتاد، والتحكم في العتاد على مستوى منخفض، والاستشعار، والتعرف، وSLAM (الموقع والخريطة المتزامنة)، والملاحة، والتلاعب، وإدارة الحزم، والمكتبات، وأدوات التصحيح والتطوير. تشمل منصات الأجهزة الروبوتية مثل الروبوتات المتنقلة، والطائرات بدون طيار، روبوت يحاكي الانسان. من بين هذه البرمجيات تتضمن نظام التشغيل للروبوتات (ROS)، وسيط تقنية الروبوتات المفتوحة الياباني (OpenRTM)، OROCOS3 الأوروبية المتمحورة حول التحكم في الوقت الحقيقي، OPRoS4 الكورية، إلخ. على الرغم من وجود العديد من أنواع برمجيات الروبوت، مما يسبب العديد من التعقيدات والمشاكل، إلا أن الباحثين في مجال الروبوتات من جميع أنحاء العالم يتعاونون لتحويل نظام التشغيل للروبوتات (ROS) إلى أكثر منصات الروبوت شيوعًا.
١.٣.٣ نظام تشغيل الروبوت (ROS):
هو مجموعة من مكتبات البرمجيات والأدوات التي تنفذ مجموعة متنوعة من أدوات واجهة المستخدم الرسومية في شكل إضافات)، وأداة تصور ثلاثية الأبعاد (RViz) التي يمكن استخدامها دون تطوير الأدوات اللازمة لتطوير الروبوتات. علاوة على ذلك، يمكن للأداة أيضًا استقبال معلومات المسافة ثلاثية الأبعاد من Intel RealSense أو Microsoft Kinect وتحويلها بسهولة إلى شكل سحابة نقاط وعرضها على أداة التصور. لذلك، يدعم ROS مجموعة متنوعة من أنظمة التشغيل مثل Windows (XP، 7، 8، 10)، وLinux (Linux Mint، Ubuntu، Fedora، Gentoo)، وMac (OS X Mavericks، Yosemite، El Capitan)، حيث يعتبر Ubuntu الأكثر استخدامًا بين مستخدمي ROS.
كما أنه يحتوي على العديد من المفاهيم التي يجب معرفتها:
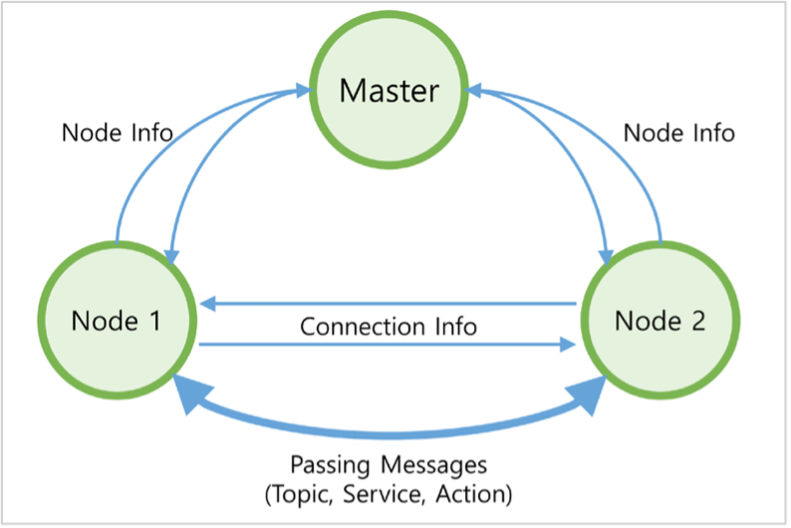
- Master: يعمل كخادم اسم للاتصالات من نود إلى نود والتواصل فيما بينها. عند تشغيل “roscore”، سيتم تكوين الرئيس مع عنوان URI (يستخدم افتراضيًا عنوان IP للكمبيوتر المحلي) ورقم المنفذ 11311.
- Node: يشير إلى أصغر وحدة معالجة تعمل لإنشاء نود واحدة لكل غرض، على سبيل المثال، يتم تقسيم برنامج تشغيل الروبوت إلى وظائف متخصصة تُستخدم لكل وظيفة مثل تشغيل الاستشعار، وتحويل بيانات الاستشعار، والتعرف على العوائق، وتشغيل المحركات، وإدخال المُحرك، والتنقل.
توضح الصورة التالية طريقة ربط Node مع Master، Master يقوم بتسمية Nodes وتسجيلها معلوماتها.
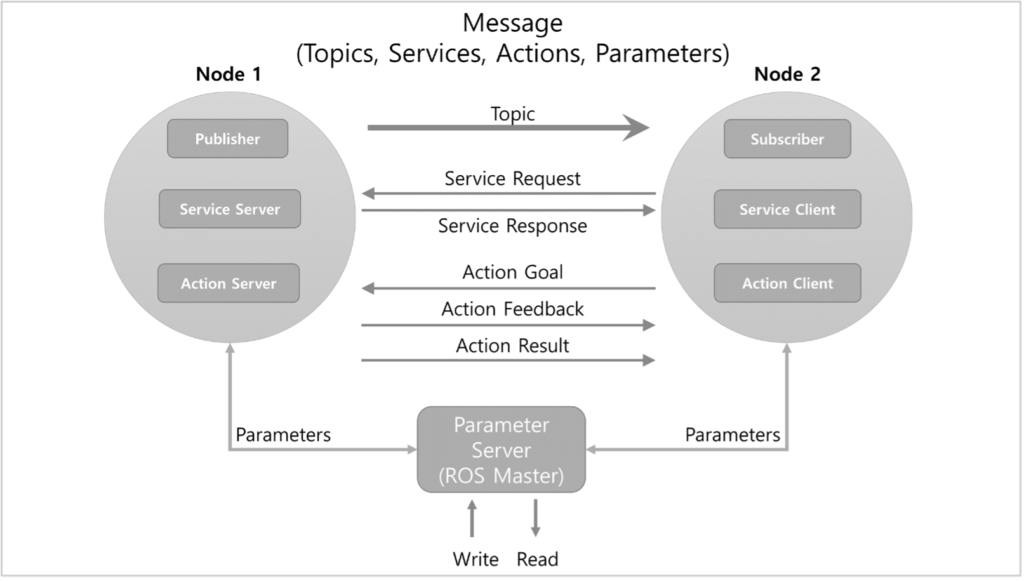
- Message: يقوم النود بإرسال أو استقبال البيانات بين النودات عبر رسالة. الرسائل هي متغيرات مثل الأعداد الصحيحة والعشرية والبوليانية.
- Publisher: يقوم الناشر بتسجيل معلوماته الخاصة وموضوعه مع الرئيس ويرسل رسالة إلى النودات المشتركة المتصلة التي تهتم بنفس الموضوع. يتم تعريف الناشر في النود ويمكن تعريفه مرات عديدة في نود واحد.
- Subscriber: يقوم النود المشترك بتسجيل معلوماته الخاصة وموضوعه مع الرئيس ويتلقى معلومات الناشر الذي ينشر الموضوع ذي الصلة من الرئيس. استنادًا إلى معلومات الناشر التي تم تلقيها، يطلب النود المشترك مباشرة الاتصال بالناشر ويتلقى الرسائل من الناشر المتصل.
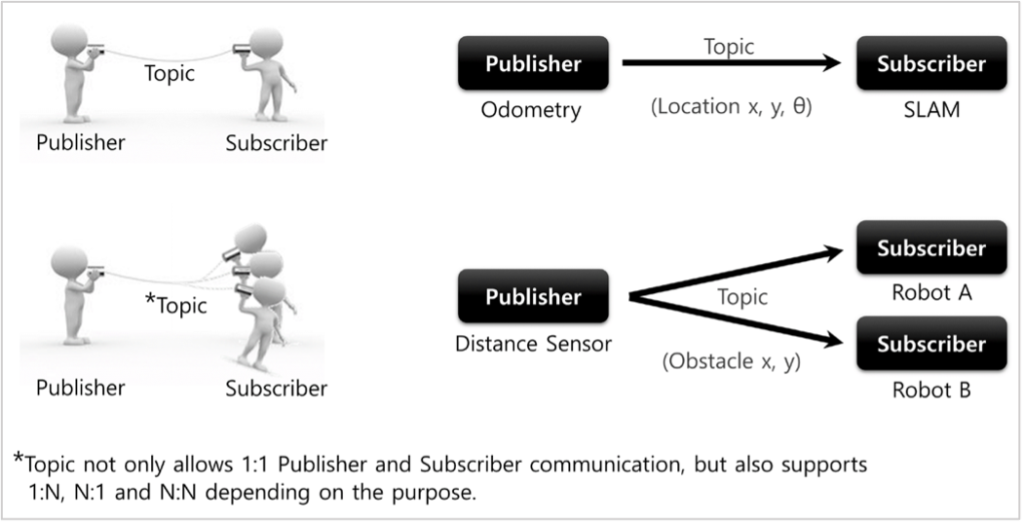
- Topic: يسجل الناشر أولاً موضوعه مع الرئيس ثم يبدأ في نشر الرسائل على الموضوع. النودات المشتركة التي ترغب في استقبال الموضوع تطلب معلومات الناشر المتعلقة بموضوع معين من الرئيس. استنادًا إلى هذه المعلومات، تقوم النود المشترك مباشرة بالاتصال بالناشر لتبادل الرسائل كموضوع.
- Service: هي التواصل المزدوج الاتجاه بين العميل الخدمة الذي يطلب خدمة معينة بشأن مهمة معينة والخادم الخدمة الذي يتولى الرد على الطلبات.
- Action: يُستخدم عندما يستغرق الرد بعض الوقت بعد استلام الطلب ويتطلب الردود الوسيطة حتى يتم إرجاع النتيجة.
بالإضافة إلى ذلك، يمكن للعديد من Subscriber تلقي Message من Publisher والعكس صحيح. علاوة على ذلك، تتوفر اتصالات متعددة Publisher وSubscriber أيضًا.
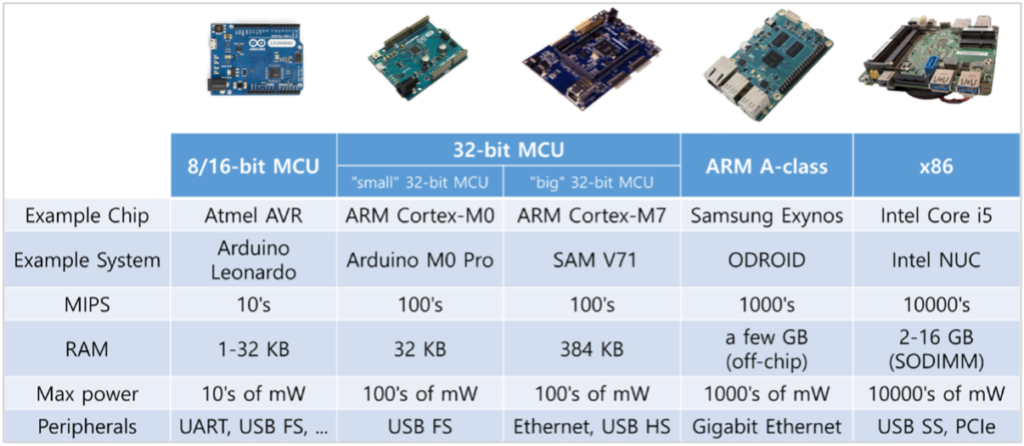
١.٣.٤ النظام المضمن:
النظام المضمن هو نظام إلكتروني يتواجد داخل جهاز كنظام كمبيوتر يقوم بوظائف محددة للتحكم في آلة أو نظام آخر يتطلب التحكم. بعبارة أخرى، يمكن تعريف النظام المضمن على أنه نظام كمبيوتر لأغراض محددة يكون جزءًا من الجهاز بأكمله ويعمل كعقل للأنظمة التي تحتاج إلى التحكم فيها. وبشكل خاص، يتطلب استخدام المحرك أو الاستشعار للروبوت وحدة معالجة مصغرة قادرة على التحكم في الوقت الحقيقي، ويتطلب معالج الكمبيوتر عالي الأداء لمعالجة الصور باستخدام الكاميرا أو للتنقل والتلاعب. توضح الشكل 5 مجموعة متنوعة من الأنظمة من المعالج المصغر بتقنية 8 بت إلى الحاسوب عالي الأداء، وتحتاج إلى تكوين نظام مضمن بالأداء المناسب لتلبية الاحتياجات.
١.٣.٥ كاميرا RGB-D:
العديد من الكاميرات والأجهزة الاستشعارية هي نوع محدد من الأجهزة التي تستشعر العمق وتعمل بالتعاون مع كاميرا RGB (أحمر، أخضر، أزرق). تستطيع هذه الأجهزة تعزيز الصورة التقليدية بمعلومات العمق (المتعلقة بالمسافة إلى الاستشعار) بناءً على كل بكسل. تتمتع بعدة مزايا على الكاميرات التقليدية، مثل الوعي بالمقياس والقدرة على إعادة بناء الهياكل ثلاثية الأبعاد حتى في المناطق ذات النسيج المنخفض بسهولة وسرعة.
بالإضافة إلى ذلك، قد تقدم مساهمة كبيرة في حل أو تبسيط العديد من المهام الصعبة، مثل كشف الكائنات، وتحليل المشهد، وتقدير الوضع، وتتبع الرؤية، والتقسيم الدلالي، وتحليل الشكل، والتقديم المستند إلى الصور، وإعادة الإنشاء ثلاثية الأبعاد. هناك العديد من أجهزة الاستشعار RGB-D، مثل Microsoft Kinect وStructure IO وASUS Xtion Pro، وIntel RealSense كما هو موضح في الشكل، ظهرت في السوق.

١.٣.٦ ماسح ضوئي ثنائي الأبعاد (2D LIDAR):
أجهزة استشعار الكشف عن الضوء والمسافات توفر بيانات المسافة بدقة عالية ودقة في مجال الرؤية الزاوي الواسع. يقوم النظام بإرسال إشارة ليزرية يعكسها الهدف ثم يتم قياسها بواسطة مستشعر LIDAR. نظرًا لمعرفة سرعة الضوء c، يحدد قياسهم لوقت طيران الليزر (ToF) t مباشرة المسافة بالتالي d=(c×t)/2 .
لذلك، فإنها تؤدي بشكل مرضٍ في ظروف الطقس السيئة. في غير ذلك، لا يمكن أن يوفر معلومات حول شكل الكائن ولونه. علاوة على ذلك، يعتبر النظام القائم على مستشعر LIDAR طريقة فعالة ودقيقة للروبوتات لإنشاء خريطة وتحديد مواقعها. انظر الشكل.
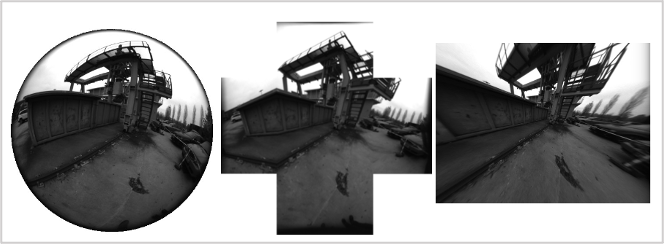
١.٣.٧ كاميرا العدسة السمكية:
مؤخرًا، جذبت كاميرات العدسة السمكية، بفضل مجالها المرأي الكبير (LFOV)، اهتمامًا متنوعًا من الخبراء التقنيين والجمهور بشكل عام. الكاميرات ذات المجال المرأي الكبير ضرورية لمجموعة متنوعة من مجالات التطبيقات الرؤية الحاسوبية، بما في ذلك مراقبة الفيديو والواقع المعزز، وقد كانت محل اهتمام خاص في قيادة السيارات الذاتية. بينما يأتي ذلك على حساب التشوه الشعاعي القوي، مما يجعله مشكلة شائعة، حيث ستظهر الصورة منحنية في الشكل 8 مما يجعل من الصعب على النماذج القياسية للرؤية الحاسوبية التعامل معها.
١.٣.٨ جهاز استشعار المسافة بالموجات فوق الصوتية:
جهاز إلكتروني يقيس مسافة الهدف عن طريق إطلاق أمواج فوق صوتية وتحويل الصوت المنعكس إلى إشارة كهربائية. ومع ذلك، يتكون أجهزة الاستشعار بالموجات فوق الصوتية من مكونين رئيسيين: المرسل، الذي يُطلق الصوت باستخدام piezoelectric crystals. والمستقبل، الذي يلتقط الصوت بعد أن يسافر إلى الهدف ويعود منه.
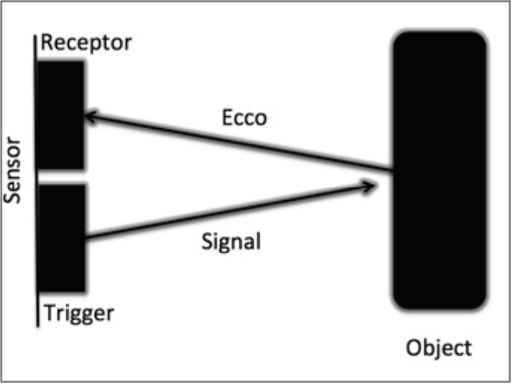
بالإضافة إلى ذلك، لحساب المسافة بين المستشعر والكائن، يقيس المستشعر الوقت الذي يستغرقه الصوت الذي يُطلقه المرسل للوصول إلى المستقبل. الصيغة لهذا الحساب هي D = ½ T x C (حيث D هي المسافة، و T هو الزمن، و C هو سرعة الصوت، وتقريبًا 343 مترًا في الثانية).
بالإضافة إلى ذلك، يتم استخدام عدة أجهزة استشعار بالموجات فوق الصوتية في العادة لتحسين دقة كشف العوائق وتقليل وقت المسح. ومع ذلك، فإن استخدام عدة أجهزة استشعار للحصول على معلومات متعددة حول العوائق يتطلب أنظمة أجهزة عتادية مكلفة لمعالجة البيانات المستلمة. علاوة على ذلك، إذا كان زاوية الانعكاس كبيرة جدًا، فإن الموجة المنعكسة من الكائن قد لا تصل إلى المستقبل، مما يؤدي إلى قياسات غير دقيقة.
١.٣.٩ محرك التيار المستمر:
محرك التيار المستمر أو محرك التيار المباشر هو جهاز كهربائي يحول الطاقة الكهربائية إلى طاقة ميكانيكية عن طريق إنشاء حقل مغناطيسي يتغذى بالتيار المستمر. عند تشغيل محرك التيار المستمر، يتم إنشاء حقل مغناطيسي في محوّله. يجذب وينفر المغناطيس على الموتور؛ وهذا يتسبب في دوران المحور. للحفاظ على دوران المحور بشكل مستمر، يوفر المبدل المرتبط بفرشات متصلة بمصدر الطاقة تيارًا للأسلاك الملفوفة في المحرك. يمكن لمحركات التيار المستمر البدء والتوقف والعكس على الفور.
١.٣.١٠ R/C Servo Motor:
محرك الخدمة R/C هو محرك كهربائي يستخدم للتحكم في عجلات القيادة للسيارة. بالإضافة إلى ذلك، تُستخدم محركات الخدمة R/C لتحويل الإشارة الكهربائية إلى حركة قطبية أو خطية. عندما يتم نقل الإشارة من الضوابط إلى السيارة، يتم فك تشفير هذه الإشارة وإرسالها إلى محرك الخدمة. ووفقًا لهذه الإشارة، سيقوم محرك الخدمة بتدوير عمود الدفع الخاص به لبضع درجات، وسيتم ترجمة هذا الدوران إلى توجيه العجلات. يتم تشغيلها باستخدام دائرة PWM.


